OpenGL入门
本文最后更新于:6 个月前
https://learnopengl-cn.github.io/
基本是跟着这个网站来的,感谢大佬们提供了这么好的资源
OpenGL 状态机
熟悉这种状态机的模式非常有帮助。
openGL中的各种对象通常通过 glGenXXX 来生成,对象用一个uint来标识,openGL内部会记录这个uint对应的对象内容,我们只需把这个数看做一个对象即可。
绑定,openGL中常需要进行 glBindxxx 操作,这是将对象绑定到一个上下文,如 glBindBuffer(GL_ARRAY_BUFFER, VBO),可以认为 GL_ARRAY_BUFFER 是一个上下文,有时也称 Target,绑定后,接下来对 GL_ARRAY_BUFFER 的操作就是对 VBO 的操作。
VBO,VAO
首先关注他们的名字:
- 顶点缓冲对象:Vertex Buffer Object,VBO
- 顶点数组对象:Vertex Array Object,VAO
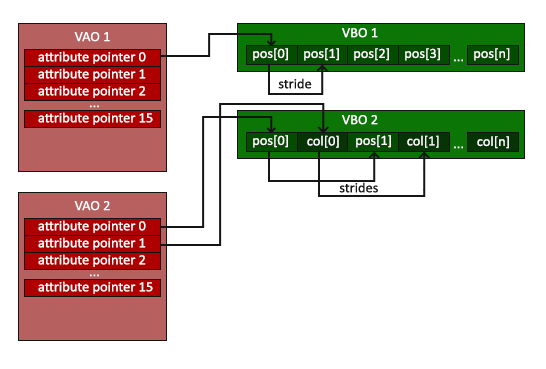
每个顶点可能会包含一堆数据(常见的有坐标,颜色等),CPU需要把这些数据发送给显卡,为了一次性发送大量数据,会使用一个缓冲来暂存顶点数据,这就是VBO,它仅仅只是一堆本质上没区别的数据,具体如何访问这些数据,就是VAO决定的。
可以认为,VAO对VBO的数据定义了一种分类,组装的方式,将一堆数据拼成了有意义的一个数组,VAO就是把这种访问方式保存下来。
具体而言,我们可以创建一个VBO来保存东西:
unsigned int VBO;
//glGenXXX就是创建一个对象,为其分配空间
glGenBuffers(1, &VBO);
//将VBO绑定上缓冲GL_ARRAY_BUFFER,可以理解为设置状态:当前存储顶点的位置是VBO
glBindBuffer(GL_ARRAY_BUFFER, VBO);
//往一个缓冲中塞数据,这时的VBO已经绑定GL_ARRAY_BUFFER,这样就能保存在这个VBO当中
glBufferData(GL_ARRAY_BUFFER, sizeof(dataSource), dataSource, GL_STATIC_DRAW);这样就有一块纯纯的数据了,可以用下面两行东西来指定这块东西的解读方式:
//设置对数据的解读方式
//首先,每个顶点属性有一个属性值(标号)(即vertexShader中的layout)
//这里的意思是:对于属性值为0的属性,它要读取3个float,不需要标准化,下一个顶点的对应属性在3个步长之后,从0开始读。
//然后设置:将属性值为0的顶点属性启用(默认是禁用的)
glVertexAttribPointer(0, 3, GL_FLOAT, GL_FALSE, 3 * sizeof(float), (void*)0);
glEnableVertexAttribArray(0);然后就能一行完成渲染啦!第一个参数为图元装配方式,指定为三角形,也就是说会把我们输入的顶点,每三个组成一个三角形传入片元着色器。从0位置开始,一共读3个顶点
glDrawArrays(GL_TRIANGLES, 0, 3);因为openGL是一个大状态机,在渲染不同物体时,必须绑定对应的VBO,更改对应的解读方式才行。这样换起来太麻烦了,于是有了VAO:它能把这些都保存起来,然后直接绑定VAO就能自动绑定上VBO和切换glVertexAttribPointer。为什么它叫顶点数组对象呢?我理解为,它获取到一块数据和对应的解读方式,就直接将顶点分类包装成数组了。它具体存储的是什么,目前理解比较浅。
unsigned int VAO;
glGenVertexArrays(1, &VAO);
glBindVertexArray(VAO);
...
glBindVertexArray(0);VAO是工作在bind和unbind之间的,也就是说,在glVertexAttribPointer之前,先将VAO绑定,然后VAO将记录你执行的glVertexAttribPointer,保存这一解读方式(同时也保存了当前绑定的VBO),记录完成后解绑VAO即可。渲染时如果要调用这组数据,直接绑定这个VAO就可以了,将自动设置glVertexAttrib Pointer和VBO,非常方便。
更多顶点属性
如果顶点包含两个属性:位置和颜色,在顶点着色器中分别将属性值设置为0和1
属性值只是一种标号,和内存地址无关
#version 330 core
layout (location = 0) in vec3 aPos; // 位置变量的属性位置值为 0
layout (location = 1) in vec3 aColor; // 颜色变量的属性位置值为 1然后是VBO中的数据,里面有三个顶点:
float vertices[] = {
// 位置 // 颜色
0.5f, -0.5f, 0.0f, 1.0f, 0.0f, 0.0f, // 右下
-0.5f, -0.5f, 0.0f, 0.0f, 1.0f, 0.0f, // 左下
0.0f, 0.5f, 0.0f, 0.0f, 0.0f, 1.0f // 顶部
};对于这样的情况,解读方式应该是:
//位置属性
glVertexAttribPointer(0, 3, GL_FLOAT, GL_FALSE, 6 * sizeof(float), (void*)0);
glEnableVertexAttribArray(0);
//颜色属性
glVertexAttribPointer(1, 3, GL_FLOAT, GL_FALSE, 6 * sizeof(float), (void*)(3* sizeof(float)));
glEnableVertexAttribArray(1);注意:属性长度仍然是3,两个属性都只需要读3float的数据,步长是6,因为一个位置属性和下一个位置属性间隔6float,颜色属性的偏移为3,即起始点从3开始,6格6格跳
EBO 索引缓冲
实际绘制物体时,可以用一个个小三角拼成,比如要拼一个正方形,顶点数组可以这样:
float dataSource2[] = {
0.9f, 0.9f, 0.0f,
0.9f, 0.5f, 0.0f,
0.5f, 0.5f, 0.0f,
0.5f, 0.5f, 0.0f,
0.5f, 0.9f, 0.0f,
0.9f, 0.9f, 0.0f
};图元装配时指定装配6个顶点,可以轻松得到一个正方形,它是两个三角形拼起来的
glDrawArrays(GL_TRIANGLES, 0, 6);但是这样显然有大量冗余,所谓索引缓冲对象,就是指定了遍历顶点的方式,默认是从0..n这样遍历的,
我们可以指定遍历顺序。
unsigned int indices[] = { // 注意索引从0开始!
0, 1, 2, // 第一个三角形
2, 3, 0 // 第二个三角形
};
unsigned int EBO;
glGenBuffers(1, &EBO);
glBindBuffer(GL_ELEMENT_ARRAY_BUFFER, EBO);
glBufferData(GL_ELEMENT_ARRAY_BUFFER, sizeof(indices), indices, GL_STATIC_DRAW);这里用和VBO相似的方式,配置了一个EBO,同样地,这个信息可以被VAO存储,只需要写在VAO的bind和unbind之间即可。
glDrawElements(GL_TRIANGLES, 6, GL_UNSIGNED_INT, 0);把绘图函数改成这个,即可按照当前绑定在GL_ELEMENT_ARRAY_BUFFER上的索引表来遍历。
着色器
主要编写的是顶点着色器和片段着色器
顶点着色器必须给出一个gl_Position,它表示这个顶点所在的位置(在标准化设备坐标下的,实际参与渲染的位置,不是什么局部坐标世界坐标之类的)
顶点着色器的其他各种输出信息在光栅化阶段会被各种“插值”,变成大量片元输出到片元着色器。比如经典的:用三个顶点坐标显示一个宏观的三角形,实际上片元着色器接受到的片段有成百上千个,但我们仅输入了三个顶点,每一个片段的具体位置均是根据插值得到的。
同时,各种其他顶点输出的信息也都会被插值,比如颜色等等。
片段着色器负责计算一个像素的最终颜色,它可能需要从顶点着色器中接收一些
uniform
着色器中可以使用uniform定义一个唯一的变量,在外部通过一些操作更改(实现外部直接把值传入shader任意一个阶段)
uniform float offX = 0, offY = 0;外部,传入名称和值即可,glUniform后+数字+类型,如3f表示更改的是一个3维float向量类型
glUniform1i(glGetUniformLocation(shaderProgram, name), value);外部获取这个值?没有找到资料,可能从外部获取它的值本就不合逻辑
uniform不能在shader内部赋值,但可以初始化(设置缺省值)
特殊的uniform
uniform sampler2D texture1;用于获取纹理,它的值可以用int方式更改,如果它为2,那么它就表示GL_TEXTURE2这个纹理单元上的纹理图片,在shader中使用 texture(texture1, Texpos) 获得这张纹理具体位置上的颜色。
sampler2D 是一种“不透明类型”,它不能被实例化,只能定义为uniform。
包含有不透明类型的结构体、类同样为不透明类型。
注意:虽然 glUseProgram 指明了shaderprogram,但仍必须use着色器之后才能对其设置!
纹理
Texture unit(GL_TEXTUREi) 包含了多种 Target,但规范明确表示了,每个sampler必须使用不同的unit,即便它们的类型不同。
完整管线
顶点进入顶点着色器,经历局部坐标 - 世界坐标 - 观察坐标,变换到观察空间
随后通过一个投影矩阵,这个投影矩阵定义了空间中一块能看见的区域(长方体、平头截体),投影矩阵将这片区域映射到 $[-1,1]^3$ 这个小立方体中,我们最终只绘制这个小立方体内的物体。
这个小立方体就是裁剪空间,也叫标准设备坐标系,NDC。后续操作在这个坐标系中进行。
我们在上面的变换中一直认为 $(a,b,c,1)$ 和 $(aw,bw,cw,w)$ 是同一个坐标,转换到NDC之后该归一化一下了,这一步也叫透视除法,就是让每个顶点的 $x,y,z$ 都除以它的 $w$ 分量,$w$ 分量本身保持不变,是为了保留其深度信息以做矫正。
然后进行一个简单的视口变换,在 $xy$ 方向拉伸平移一下,不去动 $z$。
在此之前我们一直对顶点操作,接下来进行图元装配,经过几何着色器我们得到了三角形(或者其他形状)
对三角形进行光栅化,随后每个像素(片段)进入片段着色器,用插值后的数据来计算这个像素的最终颜色并输出。
随后进行深度测试,丢弃一些片段,通常也可以在着色一个像素前就测试并丢弃。
上述视口变换和图元装配,顺序应该无所谓。
理清变换
理清的关键点:
使用四阶矩阵,不仅能表达一种变换,也能表达一种坐标系。左上三维为三个基向量,右列三个数为原点位置,右下角为 $w$ 分量
- 可以视为先进行了左上3x3矩阵所示的线性变换,再进行了一个平移
对于每个物体,用一个Transform矩阵表达其坐标系,它也相当于物体从和世界坐标系重合(单位矩阵)开始,到当前状态经历的变换。对物体的变换都是对整个坐标系的变换
- 这个变换看起来不是线性变换(移动了原点),但在四维空间下,它是线性变换。
- 如果想让物体参照世界坐标系变换,就直接在其矩阵左侧乘即可。
- 如果想让物体参考自身坐标系变换,可以运用相似矩阵(相当于矩阵右侧乘)
对于单个顶点,才用向量表示,它在物体坐标系下是一个固定的量。
相机可以认为是一个物体,它有一个坐标系,它的朝向是一个向量,相对于相机坐标系也固定的,在openGL中应为 $(0,0,-1)$(朝 $z$ 轴负方向)
- 因此也可以用一个简单的矩阵来描述相机,不必关心其朝向,因为我们直接记录了相机坐标系,朝向固定为 $(0,0-1)$
光照
当我们把一个光照施加到一个物体上时,输出光照颜色和物体颜色的乘积(各个分量各自相乘)即可,注意这里的颜色量值域为(0, 1),而非(0, 255)
冯氏光照模型主要分三部分:环境光照,漫反射,镜面反射
环境光照:始终使物体接受到某个光照,例如(0.1, 0.1, 0.1)
漫反射:对于每个片元,取其法向量和光照方向的点积(二者都标准化到模为1)作为光照强度,即正对光照的亮度高,背对的亮度低。(这个阶段我们一般不考虑阻挡、距离等因素)
镜面反射:对每个片元,取其光照反射方向(通过法向量计算)和玩家视觉方向的点积,作为光照强度,意义是玩家在某个片元反射方向附近时,能看到它上面的高光。
点积的两个向量都为标准化向量,故结果不大于1,为了更加凸显高光可以对这个值取幂,一般取32次幂为宜,越大则说明高光越集中,反射能力越强。
注意镜面反射仅与观察者位置有关,与观察者视角无关
法线
直观上来讲,一个三角形的法线可以直接由三条边计算出来,但openGL并不会直接帮我们算这个,是有原因的。
法线信息一般放在顶点上,若模型没给定,可以由面法线均值计算得到。
片元法线如果由插值得到,可以获得平滑的光照效果,而如果三个顶点法线都一样,则可以有锐利边缘。
法线变换
物体变换时法线也应该跟着变,法线和一般的顶点位置向量不同,在不等比缩放时,它应当保持垂直关系而非进行相同变换;它也不应受位移影响。
简单数理推导可得出,法线变换矩阵应当是变换矩阵左上3x3矩阵的逆矩阵的转置
逆矩阵运算对于GPU来说非常慢,故最好在CPU中计算好直接传入。
材质和光照贴图
材质即物体的贴图+上述光照模型中的参数,通过更改三种光的强度以及反光度可以模拟不同物体的反射效果。
并不是每一个参数都值得更改,一般的材质:
struct Material{
sampler2D diffuse;
vec3 specular;
float spininess;
};- 环境光颜色与漫反射颜色 = 物体自身颜色,通常没必要更改,强度差别取决于光照设定
- 镜面光颜色 = 白 * 一定系数,这个系数决定了镜面光的亮度。
- 也可以用物体自身颜色,这会使高光更接近物体自身颜色,使用白色则高光更接近光源颜色。
- 反光度/镜面反射率决定了表面反光能力,越大则反光越强,高光越集中,越适用于金属玻璃等材质。
材质参考:http://devernay.free.fr/cours/opengl/materials.html
光照材质:
struct Light{
vec3 position;
vec3 ambient;
vec3 diffuse;
vec3 specular;
};环境光、漫反射、镜面反射的配比取决于我们对光照的设定。通常镜面颜色设置为光源本身颜色,漫反射和环境光设置为光源颜色的0.6, 0.2倍左右。
光照贴图
可以给物体附上多张贴图,在漫反射部分使用漫反射贴图,镜面反射部分使用高光反射贴图,实现同一个物体表面不同部分的不同效果。
网格与模型
网格这个名词一开始让我有点搞不明白,后来我意识到一件事情:3d模型是十分复杂的,除了基本的顶点数据之外,还可能包含多张贴图、动画、多种材质乃至场景信息,不同部分可能应用不同贴图。
“网格”就是一组三角面片,包含一个顶点数组和相应贴图,即先前我们理解中最简单的模型,一个实际的模型包含许多网格。
模型除了用网格表示外,还有点云、体素等多种方式。本项目只考虑网格。
模型文件格式众多,可以使用工具库assimp读取,需要了解的是大多数模型存储的逻辑:使用一个模型文件记录网格信息,在旁边放贴图等资源文件,模型文件中包含了贴图相对路径等信息。故通常不能将下载到的模型和资源文件拆开。
缓冲与测试
openGL提供了若干种缓冲(临时数组),我们通常在每一帧绘制前使用 glClear 清空这些缓冲。
深度测试和模板测试可以根据缓冲内容选择性地抛弃一些片元,可以用 glEnable 启用测试,也有各自的函数来配置筛选方法、写入掩码等等。
深度缓冲和模板缓冲都以屏幕位置为索引,它们在每一次绘制前被清空,绘制内容时被更新,从而影响接下来的绘制。简而言之它们是面向整个场景而非单个物体的。
深度测试
记录屏幕坐标下每个位置上的片元深度($z$ 坐标),一般情况下,仅当新片元深度更小时才会绘制并更新。可以用 glglDepthFunc 配置其他的筛选方式。
关于深度:强大的裁剪矩阵已经帮我们计算好了每个片元的 $x,y$ 位置以及深度,深度测试其实就是记录每个位置的最大深度以及颜色。它使用的缓冲我们需要手动清空 glClear(GL_DEPTH_BUFFER_BIT);,记得 glClear 是用bitmask的,可以把 GL_DEPTH_BUFFER_BIT 和其他东西或起来。
裁剪矩阵对 $z$ 轴的映射也不是线性的,越远的地方粒度越大,精度越低。
具体而言,映射后的深度值(也叫深度精度值?)是与 $1/z$ 正相关的,如近平面距离为2,远平面距离为10,则深度值0.5实际对应了 $\frac{1}{1/2+1/10}$ 即距离2.5的地方。
片段着色器中,gl_FragCoord这个内建变量存储了该片段的深度信息,$x,y,z$ 分别表示片段的位置和深度。
深度冲突
如果两个平面恰好重叠在一起,就很难说明谁上谁下了,常常会导致闪烁,实际渲染中应当尽量避免此类情况。
模板测试
面剔除
一种非常聪明的技巧。
试想:在我们观察一个封闭几何体的时候,总有几个面是永远看不到的(是指背面,而非里面),对于这几个面,虽然用深度缓冲能覆盖他们,但还不够优秀,我们有办法把它更早一步剔除掉。
如果我们在定义一个面的顶点顺序时,始终假设我们面向它(从封闭几何体的外部),然后逆时针写下这三个顶点。
那么在三角形变换到裁剪空间下后,如果它还是面向我们,三个顶点就一定是逆时针的,否则就一定是顺时针,可以直接将其剔除。
判断顺逆时针是个运算量很小的活,所以面剔除能非常有效地提升性能。
面剔除的结果:在封闭几何体的内部观察时,它透明了。如果我们对一个单独的三角形进行面剔除,会发现只能从一个方向上看到它,这些特性有时也会被利用到。
它可能很像是剔除了一个面的里面,但我们都知道图形学本身没有什么内外双面的概念,只是剔除了背面而已。
透明与混合
将半透明的物体绘制到原有颜色缓冲上,需要进行混合。
通常将颜色缓冲中原有的内容叫目标,即将绘制的半透明颜色叫源,将源绘制到目标上。
问题:深度测试,处于前方的透明物体先绘制之后,后面的内容将不会绘制。
解决:透明物体最后绘制,且按到视点的距离排序,由远到近绘制。
问题:距离不好排序,通常采取近似方法,适用于大部分场合。