光线追踪入门
本文最后更新于:4 个月前
光线与平面求交
光线可以表示为 $r=o+td$,其中 $o$ 为原点,$d$ 为方向。
隐式表面
隐式表面定义为 $f(p)=0$
则求解 $f(o+td)=0$ 即可,取 $t$ 最小值($t>0$)对应处作为交点。
显示表面
光线与三角形求交:
首先计算光线与三角形所在平面的交点,然后计算点是否在三角形内。
平面的方程:$f(p)=(p-p’)\cdot N=0$,$p’$ 为平面上任意点,$N$ 为平面的任意垂线,而从三角形得出这样的平面参数很简单。
另一种方式:列出三角形面的方程(重心坐标),得到 $O+tD=(1-u-v)P_0+uP_1+vP_2$,它可以写作一个线性方程组,解得 $t,u,v$,然后判断重心坐标是否都在 $[0,1]$ 内。
此处碰撞得到的 $u,v$ 可以记录下来,之后用这个坐标获取表面材质信息。
AABB
轴对齐包围盒(Axis-Aligened Bounding Box)
求光线与包围盒是否相交:包围盒有三个对面,计算光线与每对面相交的两个 $t$ 值($t_{min}$ 和 $t_{max}$),得到三组 $t$ 的区间,这三组的区间的交集即为光线在盒子中的时间。
Grid方法
旧方法
将区域划分为很多个格子,计算每个格子中是否有物体,光线进入时可以采用类似Bresenham的方法计算接触的格子(很快),若格子中有物体再检测。
空间划分方法
八叉树
每次划分都划分为8块,直到区域不包含内容或者足够小
KD-Tree
每次仅将区域划分为2块,采用某种策略选取最优的划分位置和方向。
划分的方向还是平行的
中间节点都是包围盒,物体都存在叶子节点中。
一个图元可能被划分到多个空间中,此时这个图元就需要在多个空间中都进行求交。
BSP-Tree
在KD-tree的基础上,划分方向可以是斜的,划分效果可能更好,但抛弃了AABB,计算效率并不优秀。
BVH
Bounding Volume Hierarchy
基于物体的划分,而非基于空间的划分。
和KD-Tree差不多,但是划分时不再是将空间一刀划开,而是将其中物体分为两个部分,两个部分各自形成一棵子树,两个子树的包围盒可以重叠,这使得每个图元可以仅属于一棵子树。
实现起来非常容易,可以直接根据父包围盒三维的长度,在最长的一维上,按三角形个数划分(一半划到左一半划到右,$O(n)$ 找出中位数即可)。
递归求交时,严格意义上来说两个子空间是没有先后顺序的,即使在一个空间内找到了交点,另一个必须求交计算,这使得朴素BVH求交效率会低于kd-tree。我们很容易想到一些剪枝:根据包围盒的交点决定顺序,若在第一个空间中已经得到交点,且在第二个空间的包围盒交点之前,则跳过。
SAH优化
按三角形个数进行的划分有显而易见的问题,当出现特别大时三角形时,划分不那么均匀,重叠部分也可能非常大。
SAH (Surface Area Heuristic) 优化即按照包围表盒面积来确定一个最优的划分方案。粗略认为,一个包围盒被击中的概率与其面积成 $S$ 正比,而击中这个包围盒之后的开销,又可以粗略认为和其中的物体数 $N$ 成正比。于是SAH策略要求我们找到 $S_1N_1+S_2N_2$ 最小的划分策略。
需要排序,前后各扫一遍预处理出包围盒之后,尝试所有划分点即可(三个轴各自来一次)。
Radiometry
立体角
steradians
二维角度的标准定义(弧度):$\theta=\frac{l}{r}$,弧长/半径
三维立体角的定义:$w = \frac{A}{r^2}$,弧面面积/半径方
单位立体角:
在球面上 $(\theta,\phi)$ (通常 $\theta$ 指与z轴的夹角,$\phi$ 指在xy平面上投影的经典一维角度)处,画图容易计算弧面的微分
$$
d_A=(rd_\theta)(rsin_\theta d_\phi)
$$
则有单位立体角(微分立体角)
$$
d_w=\frac{d_A}{r^2}=sin_\theta d_\theta d_\phi
$$
立体角积分:
$$
\theta\leq \pi,\phi\leq 2\pi\
\int_{\Omega^+}d_w=\int_0^{2\pi}\int_0^{\pi} sin_\theta d_\theta d_\phi=4\pi
$$
这里具体要看球面坐标怎么定义,知道原理即可。
辐射度量学
$\phi$:辐射通量,单位时间发出的能量 $\phi=\frac{dQ}{dt}$,类似功率。通量也可以理解为单位时间通过的光子数量。单位有流明 lumen
- 渲染中我们通常不会用到 $Q$,通常都是以 $\phi$ 来衡量能量。
$I$:Intensity,点光源发出的,在单位立体角上的Power,$I=\frac{d\phi}{dw}$,或 $I=\frac{\phi}{4\pi}$
$E$:Irradiance,每单位面积接受到的Power,$E=\frac{d\phi}{dA}$,这个量仅用来衡量单位面积上接收到的通量,并关心光是从什么方向入射的。
- 点光源自由发散时,随距离增大,Intensity不变(单位立体角上的光强没变),接受方的Irradiance按 $r^2$ 衰减。
$L$:Radiance,单位面积在单位立体角上的辐射Power $L=\frac{d^2\phi}{d_wd_Acos_\theta}$
- $E = \int_{\Omega^+} Lcos_\theta d_w$,这里看出,$E$ 是从表面角度来考虑的,而 $L$ 是从光线角度考虑的。
关于Radiance,我在很长一段时间里没能理解它的本质,从而对无法自己推导出BRDF的公式。另一件事情也同样困惑了我很久:直接光照下,光源距离物体越远,照明效果越差;而在路径追踪中,我们计算来自下一次反射的 $L_i$ 时,却根本不考虑下一个Bounce距离我们有多远。更进一步,人眼无论距离物体多远,看到的颜色都一样,应该怎么解释?
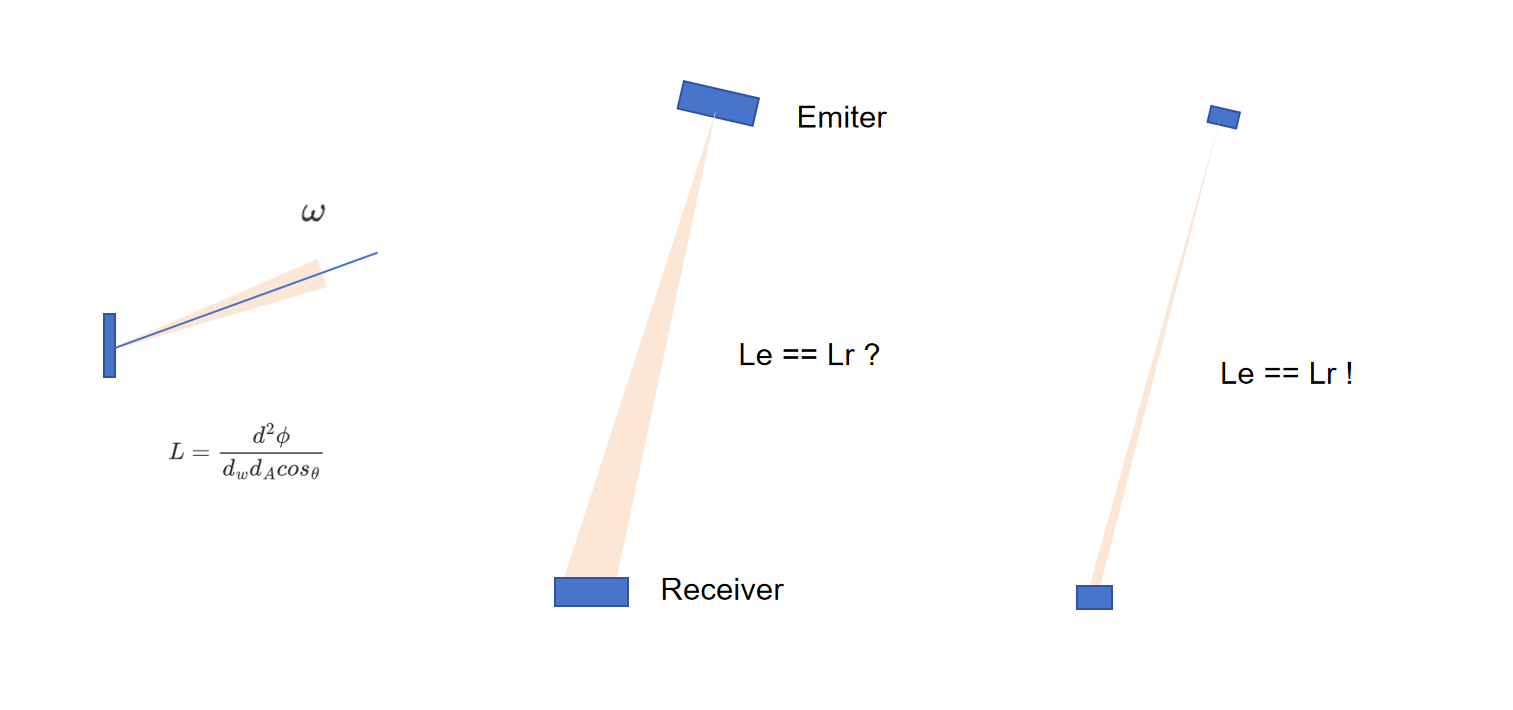
如果只看前两幅图,会觉得计算 $L_i$ 必然要考虑到双方之间的距离,并且处理起来很困难。同时还面临着“发射方的L和接收方的L是一个东西吗?”的疑问。
但当微分立体角无限小,$dA$ 无限小时,$L$ 就是一根光线(不存在近似,这是一个 $\frac{x}{\infty}$ 的问题)。它无论传输到近处还是远处,只要距离是有限的,都一样。
有了这个想法,一切都迎刃而解了:$L$ 是衡量光线的一个物理量,它不会随着传输距离而损耗。那么,发射方的Radiance和接收方的Radiance得以统一,Radiance成为了我们路径追踪中,最适合用于衡量光线能量的物理量。
人眼看到物体的颜色与距离无关,也可以用上述理论阐述:视网膜上任意微面 $dA$ 接收到的Radiance没有变,变了的只是物体在视网膜上成像的面积。
错误认识:物体发出很多根光线,随着距离增大,光线会变稀疏(Radiance变小)。
在 $d_w$ 无限细分的情况下,光线有无数根,在有限的距离下,Radiance不变。这是一个 $\frac{\infty}{x}$ 的问题。
渲染方程
$$
L_o(p,w_o)=L_e(p,w_o)+\int_{\Omega^+}L_i(p,w_i)f_r(p,w_i\rightarrow w_o)cos\theta_idw_i
$$
其中,$w$ 表示一个方向,$dw$ 为这个方向上的微分立体角。
$w_r$ 方向上的辐射,等于自身在这个方向的发光(辐射)加上所有其他方向 $w_i$ 入射的光反射对 $w_r$ 的贡献。$f_r(p,w_i\rightarrow w_r)$ 是一个BRDF方程,定义了一个方向的入射光对另一个方向出射光的贡献,通过定义不同的BRDF方程可以实现不同的材质。
渲染方程是递归定义的,是正确的,这里的正确指它完全符合现实世界,但我们实现时还是需要用到一点近似,或者说仅仅实现“期望上正确”。
蒙特卡洛方法
随机采样。
通用形式(使用任何分布的概率来采样),近似地求 $f(x)$ 的定积分,定积分域蕴含在随机变量 $X$ 中。
$$
\frac{1}{N}\sum_{i=1}^N \frac{f(X_i)}{p(X_i)}
$$
渲染方程应用蒙特卡洛方法之后(这里暂时忽略了自发光):
$$
L_o(p,w_o)=\frac{1}{N}\sum_{i=1}^N \frac{L_i(p,w_i)f_r(p,w_i\rightarrow w_o)(n\cdot w_i)}{p(w_i)}
$$
注意:上式考虑到了 $X$ 的概率密度,故一定要按照 $X$ 的分布来抽样,而不能人为干预,否则结果的期望就不正确了。
多种策略下应用蒙特卡洛方法
采样蒙特卡洛方法可以使用任何分布的概率,都正确,而使用特殊的分布可以加速收敛(准确来说,能够降低采样结果的方差)。重要性采样即对贡献较大的方向以更高的概率采样。
还可以将直接光与间接光的贡献分开统计,但这里要注意期望的正确性,不能违背蒙特卡洛方法的概率性原则,否则会收敛于一个错误结果。
对于面积光源的采样,具体见下
对于点光源的采样,很麻烦,一般使用一个小面片代表点光源。
- 一种错误的思路是直接加上点光源方向的贡献(设pdf=1),因为随机的间接光方向击中光源点的概率为0
- 这种思路下,点光源距离物体的距离不影响点光源的贡献,显然是错误的。根本在于点光源在半球上的占比没有随着距离的增大而缩小。
对于环境光源,一种想法是将其单纯作为背景色,另一种策略是对其进行重要性采样,某种意义上相当于对直接光照单独考虑。
蒙特卡洛方法的要求
虽然概率分布可以随意,但也要注意一点:
- 所有 $f(x)\gt 0$ 的地方,需要有 $p(x)\gt 0$。
- (我并没有找到这个定义,但自己想想是显然的)
可以随便举个极端例子,如只在前半段有概率,后半段无,那么结果的期望当然是不正确的。这本质是因为出现了未定义的 $\frac{0}{0}$,被当做了0处理。
不过,在 $f(x)=0$ 的地方,是可以有 $p(x)=0$ 的。
路径追踪
问题:即使随机采样,还是会出现指数爆炸的问题
- N = 1,仅反射一次,这样得到的图像会有大量噪声。
- 每个像素发出多根光线以平均
- 后期去噪
问题:无限递归
- 当然可以简单设置反弹次数,但不够好
- 轮盘赌法:设置一个概率 $p$,以概率 $p$ 往外反弹一次,得到的结果再除以 $p$,这样可以维护期望不变,场景亮度是真实的。
优化:直接光照、间接光照划分
思路:将直接光照和间接光照分开计算(分别划分到球面上的一块区域,各应用用蒙特卡洛方式积分)
因直接光照贡献较大,随机一条直线很可能碰不到直接光,故单独计算。
面光源:在立体角上的采样改为在光源面上的采样。我们将光源面投影到立体角,得到映射关系 $dw = \frac{cos\theta’}{|x’-p|^2}dA$,其中 $x’$ 是在光源面上的抽样,$\theta’$ 是 $xx’$ 连线与光源面法线的夹角,直接光照的贡献为:
$$
L_o’=AL_i(p,w_i)f_r(p,w_i\rightarrow w_o)cos\theta\frac{cos\theta’}{|x’-x|^2}
$$这是在光源面上均匀抽样了一个点,概率为 $1/A$,然后将对 $w$ 的积分改为对 $A$ 的积分。可以发现,这里实际上还蕴含了 $r^2$ 的距离衰减。
$xx’$ 连线若中间撞到其他物体,则直接光贡献为0
点光源很难处理,一般可以使用微小的面光源代替
计算间接光照,若随机到的方向撞上了光源,则贡献为0
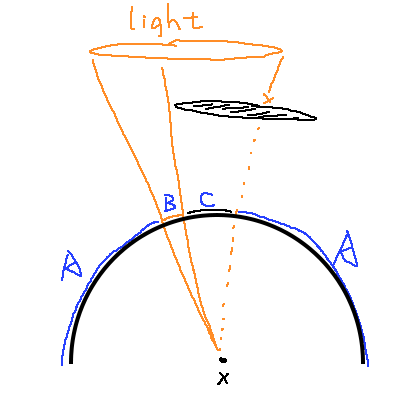
这里我将球面看做ABC三部分,直接光照求B+C段的蒙特卡洛积分,但将C段贡献视为0;间接光照求A+B+C段的蒙特卡洛积分,但将B段贡献视为0,故直接光照与间接光照相加,恰好为整个球面上的积分。至此,路径追踪仍然保持了期望上的正确性。
这种每个交点都求一次直接光照贡献的方法其实就是所谓的NEE (Next Event Estimation)。
调试策略
单纯的蒙特卡洛方法无疑是正确的,但在加上影响概率的各种操作后(如主动向光源、折射方向采样)时,就比较难保持正确性。
我曾在应用多光源时采用了错误的办法,然后调了很久都调不出想要的效果…最后发现是概率在不经意间被我改变了,,,错误的方法可能导致收敛于一个错误的结果。
个人经验:想要快速判断自己的策略在期望上是否正确,可以简单地用最朴素的蒙特卡洛方法渲染一次(均匀采样,不加任何trick),只要渲染久一点,就能看到正确的效果是什么样的。
点光源
我们已经知道怎么在蒙特卡洛路径追踪中对面积光源进行采样,并且体现出“光源的照明效果与距离相关”这件事,对于点光源,如果我们之间加上特定方向的一根光线采样,点光源的距离不会影响照明,结果显然是不对的。
在mitsuba中,面积光源的强度单位是 Radiance,而点光源的单位是 Intensity,显然这不是随意命名的。这是辐射度量学的命名。点光源没有面积,无法用Radiance衡量表面亮度,因此用Intensity,相应的,在计算点光源贡献时,到达的 Radiance = Intensity / dis ^ 2
降噪
当前帧滤波
- 模糊操作:高斯滤波
- 保留一些高频的,边缘信息:双边滤波
- 将颜色距离因素加入到滤波中去,如果两像素颜色差距较大,则减小贡献。
- 如何分辨边缘与噪声?额外信息:G-Buffer!
既然我们掌握了渲染的全过程,很容易得到一些如法线图、Albedo图,它们完全没有噪声。
类似双边滤波,我们可以将各种其他G-Buffer Feature添加到滤波中来加以指导,它们能非常有效地区分噪声和图像边缘,非常有效。
于是我们得到了联合双边滤波 Joint Bilateral Filtering
outlier/fire fly:蒙特卡洛方法容易产生一些过亮的点,也许要非常多sample才能将其平均下来;通常为了提速(并不物理正确),可以将其clamp掉。在滤波时,常将过高的颜色值clamp到 $[u-k\sigma,u+k\sigma]$ 上,同理Tempora中,也可以这么做。
TAA
https://zhuanlan.zhihu.com/p/425233743 这篇讲得很好
求一个 Motion Vector,即当前帧的像素,在上一帧的屏幕中的位置,以此混合历史像素。
混合时,可能有种种情况使得相同位置在当前帧与上一帧颜色不同(动态光源、动态物体、阴影变化等),可以利用GBuffer进行一些简单的判断来排除一些情况,但很难完全避免(例如阴影变化,就没什么很好办法能解决)。UE4的策略是利用当前帧像素的周围九个像素,计算出当前帧色彩的大致范围(可以计算颜色空间(通常转移到YCgCo下进行)的AABB来实现),混合历史帧时,clamp/clip在该范围外的信息。
另一种策略也是使用周围九宫格像素,但不直接计算包围盒,而是计算均值与方差,使用以均值为中心、若干个方差为宽度的AABB。
方差在降噪中是一个很重要的信息,降噪很多时候就是在噪声与overblur之间权衡,而方差可以指导我们动态地进行这种权衡,在噪声更严重的区域进行激进的降噪。
TODO
pixel reconstruction filter
Metropolis Light Transport
Photon Mapping
Radiosity Matrix